1 / 3
1 / 3Aplicação de Pick and Place baseada em visão com garra rotativa




Preço do Hardware:
Flexibility
high
Precision
High
DOF
3
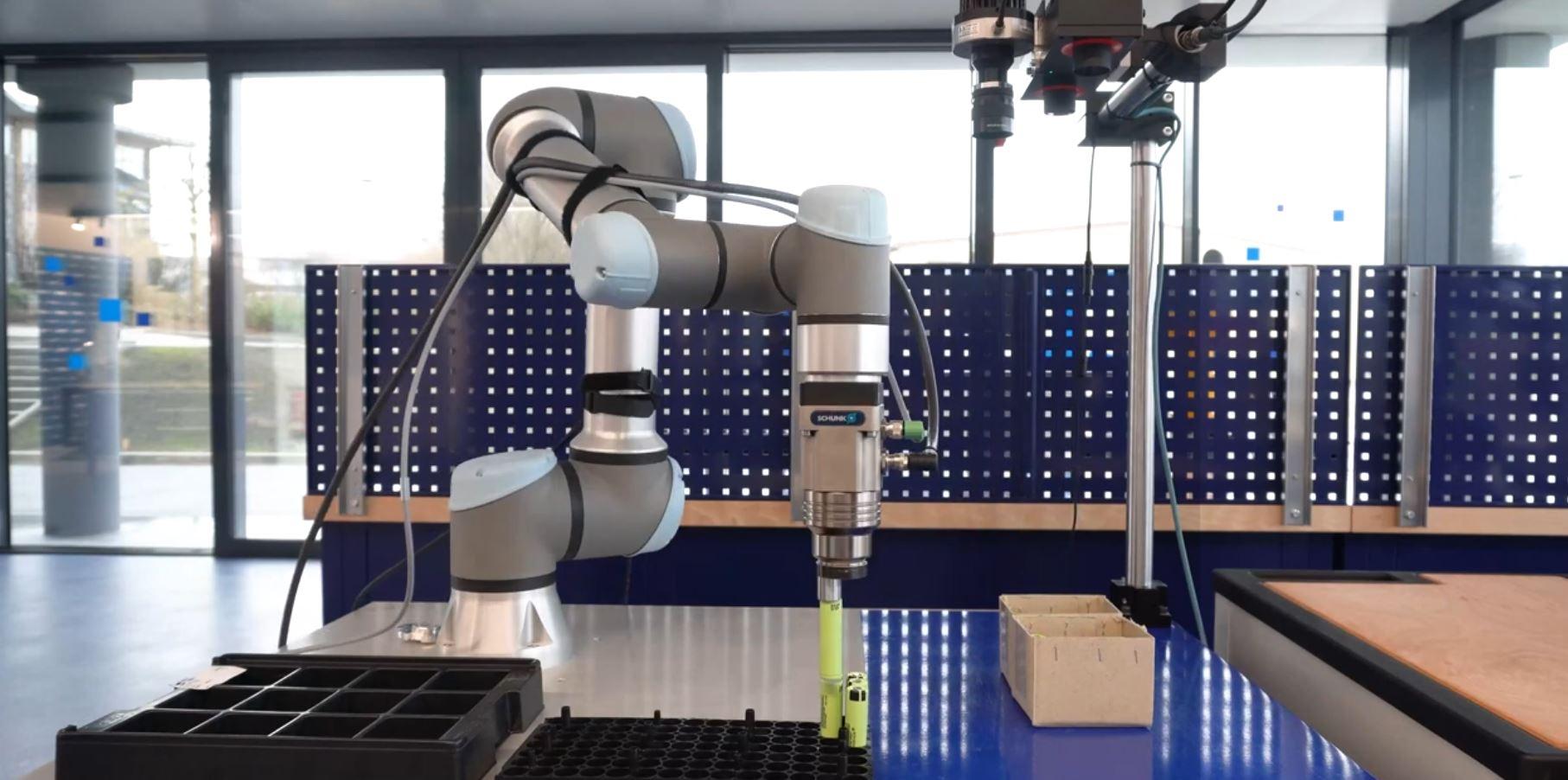
Este vídeo apresenta uma configuração de teste do cliente em que pequenos componentes são movidos em uma esteira transportadora em uma célula robótica.
No início do vídeo, vemos como os pequenos componentes são colocados na primeira esteira transportadora. Em seguida, eles são transportados para a célula robótica. Uma câmera estrategicamente posicionada na célula detecta a posição exata das peças na esteira.
Depois que a câmera captura as coordenadas das peças, essas informações são passadas para um robô delta montado na parte superior. Esse robô é equipado com uma pinça rotativa pneumática que agarra as peças com precisão.
Em seguida, o robô delta se move, controlado pelas coordenadas fornecidas pela câmera, e sempre coloca as peças na mesma orientação na segunda esteira transportadora.
O vídeo termina com um close-up das peças colocadas corretamente na segunda esteira transportadora. Esse processo demonstra a precisão e a eficiência da célula robótica no manuseio de pequenos componentes.
Em resumo, este vídeo é uma excelente representação da aplicação da tecnologia robótica moderna na fabricação e montagem. Ele mostra como o manuseio eficiente e preciso de pequenos componentes pode ser obtido com o uso de câmeras, robôs delta e garras rotativas pneumáticas.
4 Componentes